
Áreas da robótica e classificação dos robôs
- Publicidade -
No artigo anterior introduzi os conceitos de robô e robótica aqui no blog. Apresento agora um pouco das áreas da robótica e das muitas formas de se classificar os robôs. A robótica divide-se em duas grandes áreas: i) robótica avançada, em que atuam os robôs aéreos, terrestres e aquáticos como: drones/VANTs, robôs de exploração espacial, robôs de aparência humana (humanoides), carros autônomos e submarinos, por exemplo; e ii) robótica industrial, em que atuam os manipuladores de peças, robôs de esmerilhamento, robôs de pintura e robôs montadores de veículos, por exemplo. Nesses seguimentos os robôs são classificados por vários critérios. Apresenta-se aqui também três das várias formas de se classificar um robô: a estrutura cinemática, os graus de liberdade e a mobilidade da base.
- Publicidade -
Robótica avançada
É a ciência que estuda os robôs autônomos que operam em ambientes mal estruturados cujas características geométricas e físicas não são bem conhecidas. Siciliano et al. (2009) apresentam a robótica avançada como algo novo por ter uma tecnologia associada que ainda está amadurecendo continuamente.
Em consonância com os autores percebe-se que os robôs autônomos são necessários quando operadores humanos não estão disponíveis ou quando o trabalho não é seguro para humanos, mas existe a oportunidade de desenvolver produtos para mercados potencialmente amplos visando melhorar a qualidade de vida. No contexto de atuação da robótica avançada, robôs são implantados em áreas insalubres ou que oferecem risco aos seres humanos. Nestes locais, eles devem realizar tarefas de exploração e relatar dados úteis sobre o ambiente a um operador remoto, utilizando sensores adequados. Outros cenários típicos são: exploração de vulcão, intervenção em áreas contaminadas, exploração de oceanos, medicina, aplicações de defesa e de resgate e segurança. E Atualmente tem crescido muito no ramo do entretenimento.
- Publicidade -
Robótica Industrial
A Robótica industrial é definida por Siciliano et al. (2009) como a disciplina relativa ao projeto do robô, controle e aplicações na indústria. Diferente da robótica avançada, seus produtos já atingiram um nível de tecnologia estável. O robô industrial opera em um ambiente bem estruturado cuja geometria e características físicas são bem conhecidas, fato que necessita de menos autonomia. Desenvolvidos inicialmente na década de 1960 para juntar duas tecnologias, tinham como objetivos a precisão e o uso em atividades remotas. Eram caracterizados pela versatilidade, adaptabilidade, exatidão e repetibilidade de execução. Nas décadas seguintes ganhou popularidade como principal componente da automatização do sistema de produção.
Classificação dos robôs
- Publicidade -
Como dito anteriormente, há várias formas de se classificar os robôs, no entanto, aqui apresento três delas: a estrutura cinemática, os graus de liberdade e a mobilidade da base.

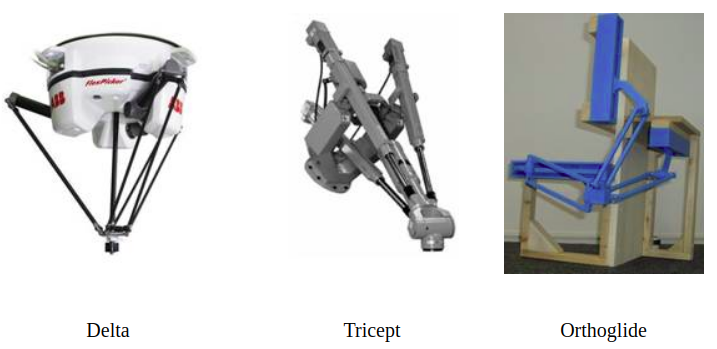
Quanto a estrutura cinemática, os robôs podem ser classificados em cadeia cinemática fechada (ou paralelos), por exemplo os robôs: cartesiano, cilíndrico, articulado, esférico e SCARA (Selective ComplianceAssembly Robot Arm); e em cadeia cinemática aberta (ou seriais), por exemplo os robos: Delta, Tricept e Orthoglid.
Quanto aos graus de liberdade é o que permite que o robô possa atingir uma posição e uma orientação no espaço. Um robô de propósito geral tem 6 graus de liberdade, ou seja, 3 coordenadas no espaço são usadas para definir a sua posição e 3 ângulos de rotação definem sua orientação. O robô que possui mais de 6 graus de liberdade, como o humanoide, por exemplo, é denominado redundante e aquele que possui menos de 6 graus de liberdade, como o SCARA, por exemplo, é denominado limitado. Por fim, quanto a mobilidade da base, os robôs podem ser fixos como os seriais e os paralelos (na robótica industrial) ou móveis como os robôs terrestres e aéreos (na robótica avançada), por exemplo.
Conclusão
Dada a relevância da robótica na indústria de modo geral, cabe dizer que ela não é a única responsável por seu desenvolvimento, seus processos carecem de fatores provenientes de áreas diversas como educação e sustentabilidade, mas, sendo o robô industrial o principal produto mecatrônico, seu uso é essencial. Vale ressaltar que no contexto de atuação, a robótica tem uma larga abrangência não restringindo-se apenas à indústria.
Autor: Elias Gonçalves
REFERÊNCIA
SICILIANO, B., SCIAVICCO, L., VILLANI, L., ORIOLO, G. Robotics: modelling, planning and control. Springer Science & Business Media. 2009.